Natural biological sensors, designed, tested, and adapted via evolutionary processes, typically exhibit sensing performances that far exceed those currently achieved by human-engineered sensors. Understanding the structural morphology, geometry, materials and the functionality of these sensors is key to construct efficient and reliable artificial sensors.
Here, we report on the development of bioinspired and biomimetic flow velocity sensors inspired by the mechanosensory lateral-line system found in blind cavefish. Lateral-line sensors enable the cavefish to detect the size, shape, identity, and location of underwater objects. Developed using robust polymer materials, these new artificial flow velocity sensors can be used for a wide range of applications including underwater robots and biomedical and microfluidic devices.

Marine animals perform complex maneuvers during activities such as preying or escaping from predator attacks. Such fascinating survival hydrodynamics exhibited by aquatic animals are possible through unique flow sensing mechanisms that assist the animals in achieving super maneuverability, and object detection and avoidance1. Some underwater animals possess velocity and pressure sensors that form a critical element of their survival. These sensors have been implicated in a number of behavioral abilities, such as, prey tracking, orientation to currents, schooling and energy efficient maneuvering2.
For example, a 30 cm long fish can accelerate to ten times gravitational acceleration in a fraction of second1. Squids of small sizes can realize burst speeds up to 25 body lengths per second. Harbor seals are capable of detecting minute flows that occur in the wake of a prey up to 30 seconds after it has passed. They achieve such ultrahigh sensitivity in flow sensing by using their whiskers, which feature a unique undulatory geometry, believed to suppress vortex-induced vibrations34.
Weakly electric fish are not only capable of locating underwater objects, but also discriminating between the objects based on their electrical properties. They function through an active sensing mechanism, wherein an electric organ discharge generates an electric field, and perturbations in this field are detected by an array of electroreceptors present on their body5. Object detection strategies inspired by electrolocation can overcome visibility issues in turbid waters, and diminished performance of sonars in cluttered waters.
Crocodiles possess integumentary sensory organs, seen as the dome shaped receptors that are dispersed on the skin. These sensors play a specialized role in detecting steady and oscillatory flows in water, and enable the crocodile in tracking the location of the disturbance67.
Harnessing the abilities of these underwater animals to sense flows and pressures on, for example the hulls of oceangoing vehicles could provide important flow information that could assist in strategies for improved control, maneuverability, and artificial vision.
Cavefish
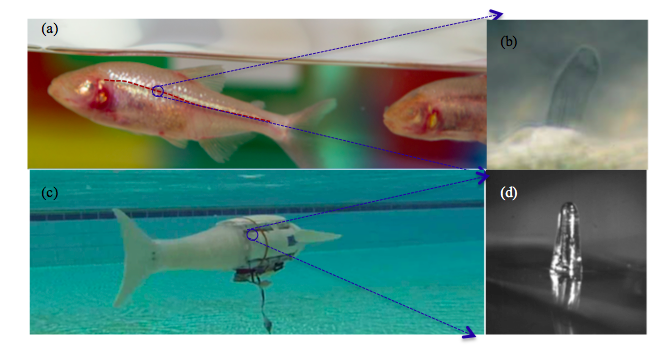
Of specific interest are blind cavefish that live in dark and deep waters. They are known to generate hydrodynamic images of their surroundings by utilizing the mechanosensory lateral line system. The smallest functional units of the lateral-line are known as neuromasts, which are located superficially on the skin (superficial neuromasts) as well as subdermally within canals (canal neuromasts)2. The neuromast sensors are known to have a contribution in the fish’s ability to detect the size, shape, identity and location of underwater objects. They also assist the fish in identifying the hydrodynamic signatures of other underwater animals2. When any object moves underwater, it produces disturbances. These disturbances act as a stimulus to the lateral lines.
The lateral-lines have also been shown to play a role in enabling the fish to conduct energy efficient maneuvers. For example, fish utilize vortices generated by the object to reduce energy expended in swimming as they face strong downstream currents8.
The neuromasts feature a soft gelatinous structure known as cupula, which is a naturally secreted polymer encapsulating a number of hair cells at the base. Cupula acts as a mechanical connection between the external flow and the embedded sensing hair cells. On top of the sensory hair cells, there exists a patch of short hairs called stereocilia or stereovilli. The morphology of the cilia is similar to the hair cells in the inner ears of mammals. Cupula also has fibers that extend along its length and are believed to provide structural support and to aid in coupling of the cupula to the hair cells beneath.
Bioinspired and Biomimetic Sensors
Inspired by these neuromast flow sensors, we have developed bioinspired and biomimetic versions of microelectromechanical systems (MEMS) artificial flow sensors. While both aim to achieve the same flow sensing functionality, the biomimetic version does so by attempting to mimic the exact morphology, materials, and mechanisms of the biological neuromast. The bioinspired sensors instead achieve the flow sensing functionality by taking a different approach that simplifies the engineering aspects of the sensor development.
In the bioinspired sensor, cupula is represented in the form of a high aspect ratio pillar that extends into the flow and interacts with the flow similar to the cupula. The pillar is attached at one end to a polymer membrane, 25mm in thickness, designed with serpentine shaped strain gauge sensing elements. Flow induced drag force displaces the pillar thereby bending the underlying polymer membrane. Strain gauges deposited on the membrane read the flow velocity through strain induced resistance change. Experiments conducted in wind and water tunnels validate that these bioinspired sensors can detect wind and water flow velocities down to 0.1 m/s and 0.015 m/s, respectively 11.
The second sensor improvises on the flow sensing functionality of the first sensor through a biomimetic inclusion of an artificial cupula. The soft material of biological cupula is composed of a glycosaminoglycan gel with Young’s modulus around 8-10 Pa9 13. Experiments show that the sensitivity achieved by this sensor favorably compares with those of the biological neuromasts in fish1214. Although the biomimetic approach of sensor development is more complex than the bioinspired approach, in terms of fabrication and assembly, it leads to a significant improvement in the sensitivity, accuracy, and threshold detection limit of the sensor.
Major challenges faced by most underwater vehicles that could be addressed through such biomimetic sensors include artificial vision to detect surroundings, and energy-efficient manoeuvring. Natural sea creatures like the blind cavefish excel in achieving these functions with a success unmatched by human undersea vehicles. Arrays of artificial MEMS sensors could offer these features to UUVs.
In addition to this, output from the sensors could assist in real-time control and feedback of the actuators of the underwater vehicles. Underwater robotic vehicles (URVs) consist of many actuators that control the limbs of the robot. A combination of several environmental and situational flow factors influence the performance of the actuators. Therefore, sensors on the actuators providing real-time feedback will significantly improve aquatic maneuvers.
Other applications of these sensors include flow profiling in drinking water, and oil pipelines and pipeline leakage monitoring. A distributed network of these sensors installed in the pipelines can continuously monitor flows in the pipelines and alert a leakage at an early stage. The sensors can also find diverse applications in biomedical devices and appliances due to their biocompatibility. For example, infusion pumps that are used to deliver drugs intravenously currently have no means of accurately sensing the velocity of fluids, thereby pump malfunctions and erroneous dosages remain undetected.
Overall, the availability of such miniaturized yet robust, low/zero-powered yet ultrasensitive, light-weight yet low-cost, surface-mountable flow sensors could offer revolutionary benefits for many applications.
Acknowledgements:
This research is supported by the National Research Foundation (NRF), Prime Minister’s Office, Singapore under its Campus for Research Excellence and Technological Enterprise (CREATE) programme. The Center for Environmental Sensing and Modeling (CENSAM) is an interdisciplinary research group (IRG) of the Singapore MIT Alliance for Research and Technology (SMART) centre.








